當前位置: 首頁 > 工業控制產品 > 運動控制 > 工業機器人 > 直角坐標型工業機器人
發布日期:2022-04-18 點擊率:102
相較于市場上出現的同類機器人產品,基于自主研發技術,新松七軸機器人在負載或成本上都更優。國產機器人將跨入人機協作新時代。
眾所周知,目前較先進的傳統機器人一般最多具有六個自由度,其中,前三個自由度引導夾手裝置至所需的位置,而后三個自由度用來決定末端執行裝置的方向。在三維空間內,剛體需要六個獨立參數確定其位姿,因此,機器人的任務空間最多需要六個自由度就足夠了,一般不要求機器人具有六個以上的獨立自由度,而過多的自由度就會產生冗余自由度。
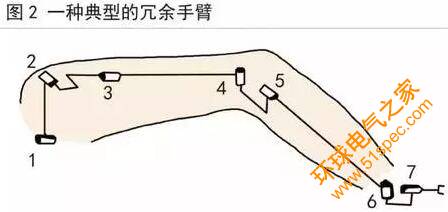
冗余度機器人,是指含有主動關節數多于完成某一作業任務所需的最少自由度數的一類機器人。其實,如上文所說,六個自由度是具有完成空間定位能力的最小自由度數,而增加的自由度便可改善機器人相關的運動學和動力學特性。
雖說真正產品化的七自由度工業機器人與傳統的六自由度,甚至更少自由度的工業機器人相比,無論是從產品種類,還是銷售占比差距都十分明顯。但正是由于其擁有有別于非冗余自由度機器人的冗余特性,使得七自由度的機器人優于六自由度機器人,而成為人們關注的焦點,也使得對冗余度機器人的研究變得日趨重要。
我國研發始于20世紀90年代初期
我國對于七軸機器人的科研工作始于20世紀90年代初,而當時項目的領軍人物正是我國已故的著名機器人技術專家、中國工程院院士張啟先,而張啟先院士的主要貢獻之一便是完成了七自由度冗余機器人樣機的研制。
上世紀80年代末,由于研制難度及其之大,國際上研制出七自由度冗余機器人樣機的國家寥寥無幾。而張啟先院士率領課題組經過幾年的艱苦拼搏,在1993年年底完成了首臺七自由度冗余機器人樣機的研制,并一次通過“863”課題驗收和部級鑒定。
盡管我國在冗余自由度機器人方面取得一定成果,但主要停留在學術論文、科研報告和實驗樣機的階段,并沒有實現真正的產品化發展,這無疑制約了我國機器人產品向高端產業化邁進的步伐。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


