當前位置: 首頁 > 工業控制產品 > 運動控制 > 工業機器人 > 直角坐標型工業機器人
發布日期:2022-04-18 點擊率:46
六個月前寫了一篇機器人抓取的專欄文章,介紹了一下機器人抓取的基本研究內容和方法。機器人從什么時候開始抓取的(上)。當時就說了未完待續,一直想更詳細的介紹下機器人抓取。在2017年的開始兩天,終于可以抽出時間來稍微整理一下這方面的內容。
完整的PPT下載鏈接
一、什么是機器人抓取?
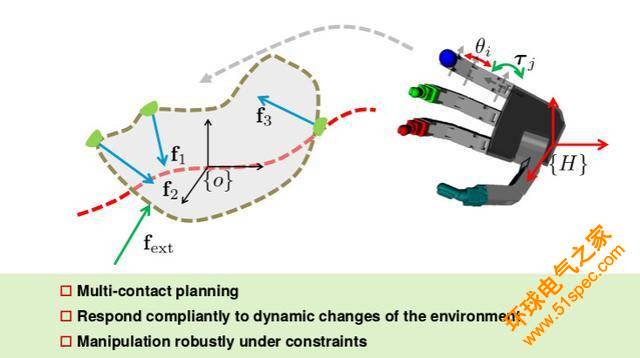
如下圖所示,給定一個物體和手,機器人抓取的基礎問題分為三個:
·怎么樣去抓
·怎么樣去控制
·怎么樣去操作
按照難度,這三個問題基本是依次遞增的。
1、怎么樣去抓?(Grasp Planning)
這個問題基本是一群大牛一開始就研究的問題,包括Salisbury,Mason,Cutkosky,Khatib 等等。大家研究來研究去,就是想知道:給定一個物體,給定一個任務,給定一個手,這個手該怎么去抓這個物體才是最好的?這個方向的最著名的結果算是force-closure了, 在很長時間基本相當于控制里面的穩定性的重要性了。我在讀博士前兩年,基本也是做這個,當時帶我的博士后Sahar在這個方向做得相當不錯,不過她轉行搞金融去了。最近這個方向基本就是往與Learning結合的套路上走,可以參考Sergey Levine在Google時的工作。
2、怎么樣去控制?(Grasp Control)
這個問題就是研究力控,包括手指末端的力控,觸覺控制等,剛度控制,阻抗控制等等。很長一段時間,大家都在試圖計算什么樣的手指抓取力才是最優的(話說當年開始讀碩士時,第一個給我郵寄紙質論文的Imin Kao 教授就是做抓取的剛度控制的)。這里面以Martin Buss和李澤湘老師組的工作最為著名,將一個非線性優化問題轉化成一個線性矩陣不等式問題,基本在幾十毫秒左右可以得到優化結果。最近的這個方面的最好的工作應該算是DLR出來的object-level impedance control(IJRR)了(文章第一作者Wimbock也轉行了)。現在還堅守在這個方向的主要就是幾個日本教授了,包括我的合作者Kenji。話說Kenji的老板Arimoto教授,退休后才開始搞機器人抓取的,還出了本書。他屬于上古大神級別,現在很少有人知道,IROS 2016他的生日聚會也相當高端,可以感受下(2006 International Symposium on Advanced Robotics and Machine Intelligence)。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


